Les Fleurs Connectées
retour sur un Gros Projet qui nous a mobilisé plusieurs mois cette année, la création de fleurs robots:
Les contenus de ce projet dispo ici sont sous licence CC – BY- NC- SA, merci de nous contacter (avec qq photos de vos réalisations) si vous dupliquez!
Ce projet très poussé, il semble plus simple de faire ici un sommaire vers les « sous-parties » :





❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀
Candidature Jardins Éphémères
Dès le début du projet nous souhaitions exposer nos fleurs avec de vrais végétaux et nous avons le soutien du Jardin de Balgan dont c’est la spécialité depuis 30 printemps.
En février nous avons déposé un dossier auprès de la ville pour participer à l’événement Jardins Éphémères avec une proposition un peu particulière : un jardin d’intérieur composé de 3 bacs distribués dans 3 lieux publics fréquentés.
Le 24 mars nous exposions nos fleurs réunies pour la première fois chez notre partenaire, les photos sont dans cet article.
+ la vidéo d’esquisse réalisée pour notre candidature:
❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀
Origines & Orga du projet
Projet issu du groupe d’adhérents inscrits au MOOC Fabrication Numérique sur FUN, qui voulait réaliser un objet synthétique des enseignements et en même temps poétique, amusant, plaisant… … avec l’idée de pouvoir un jour participer à l’événement Jardins Éphémères à Vannes.
Ici le récap’ de la phase 1 : conception et fabrication des fleurs présentées au MIBS Day.

En 5 mois nous avons développé 3 modèles différents: LOTU, VIVA & MINI (le kit).
Le dernier se décline : à 2 ou 3 moteurs, avec ou sans capteurs… Et d’autres idées sont encore à réaliser, ou en passe de l’être. (il y en a même de nouvelles qui germent chaque semaine 😉 )
Pour aborder ce travail collectif nous avons distingué 4 axes de travail et des référents pour chacun, même si tout se recoupe :
- Mécanique : Jean-Louis & Gilbert.
- Design : Sophie & Laure
- Électronique : Gilles & Mathieu
- Programmation : Mathieu & Sébastien.
(qui partagent les codes fleuris sur le github de l’asso ici)
Sur certains points nous avons cherché à optimiser en créant des gabarits supports pour toutes nos fleurs. Ainsi la boîte du socle et le montage de la carte électronique sont les mêmes et permettent d’imaginer facilement encore d’autres déclinaisons.
Avant de venir documenter nos avancées sur ce wiki nous échangeons des idées et des fichiers sur Trello (parce qu’ il a une interface sympa & facile, même si ce serait mieux si on trouvait un équivalent libre)
En attendant les contenus de ce projet dispo ici sont sous licence CC – BY- NC- SA, merci de nous contacter (avec qq photos de vos réalisations) si vous dupliquez!
❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀
Prototype entamé : Lotu
L’idée de départ : une fleur géante capable de suivre le soleil, de s’ouvrir et de se fermer en fonction de la luminosité. Voici une vidéo du proto radio-commandé en décembre dernier :
Mécanisme
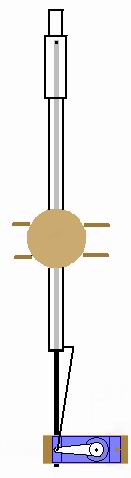
La fleur s’ouvre et se ferme comme un parapluie inversé : 2 tubes alu se chevauchent sur une courte distance, et les ‘baleines’ en bois, supports des pétales, ainsi que les 2 pièces centrales sont découpées au laser selon ce fichier. (un .svg zippé à extraire après téléchargement)
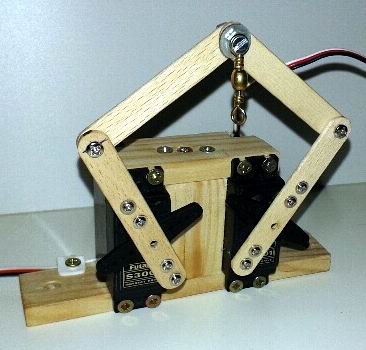
Au pied de la fleur, la tige est insérée dans une bille de bois ce qui lui permettra de s’incliner à 360°.
Dans le socle, un moteur fixé au bas de la tige pousse pour ouvrir ( ou tire pour fermer).
Améliorations à apporter : les ‘baleines’ gênent un peu la fermeture et pourraient être redessinées.
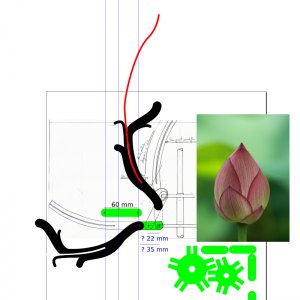 Design
Design
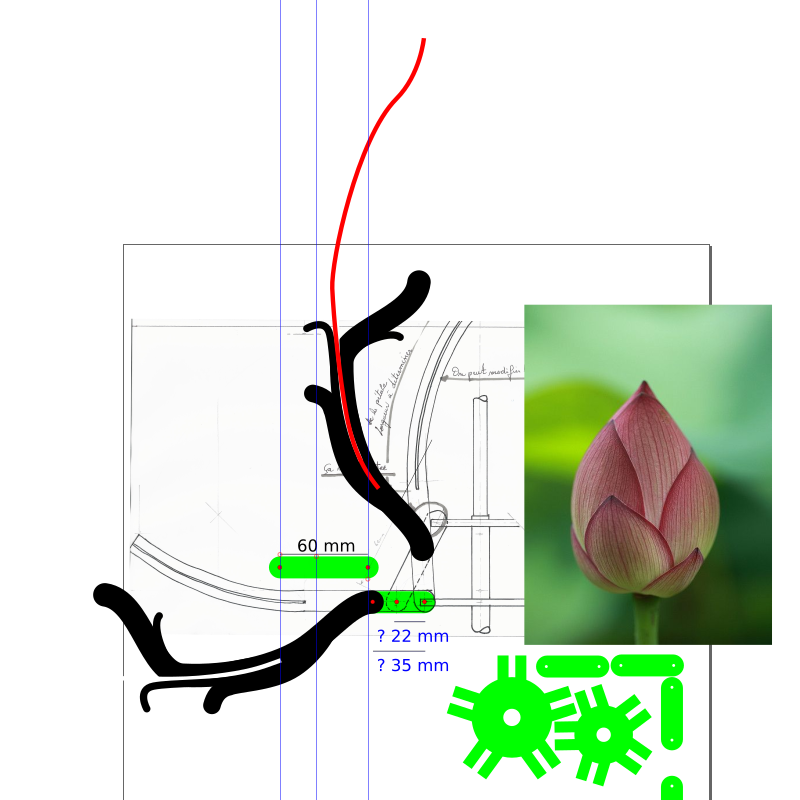

C’est la fleur où le design des pétales et la mécanique sont le plus liés… Les pétales sont d’abord dessinés avec Inkscape, puis mis en relief avec Tinkercad pour être enfin imprimés à plat et très fin avec de l’ABS phosphorescent. Ils viennent s’insérer dans les encoches prévues dans le bois.
C’est donc la torsion infligée au plastique qui les maintient en forme courbe. Améliorations à apporter : une seconde corolle de 5 autres pétales qui viendrait se placer en décalé sous la première et donnerait un vrai aspect ‘lotus’ à notre fleur.
Une solution se profile avec les essais de Sophie de Blender à la Makerbot, à suivre!
 Électronique
Électronique
Comme pour les autres, le montage de cette fleur s’appuie sur le schéma type imaginé autour de l’Arduino Nano.
Elle a pourtant quelques spécificités: les 2 moteurs qui actionnent la tige et fonctionnent ensemble, et son capteur de luminosité.
Programmation
Pour pouvoir la faire danser on a d’abord relevé les infos de ces 2 moteurs à chaque position « cardinale » max de la tige ( Nord, Nord-Est, Est… etc).
Le code complet est en développement sur le github de l’asso par ici

❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀
Prototype entamé : Viva
L’idée de départ : une fleur capable de pousser et s’épanouir ou au contraire de se flétrir en fonction (peut-être) de l’humidité ambiante ? Vidéo de mi -décembre du proto radiocommandé :
 Mécanisme
Mécanisme
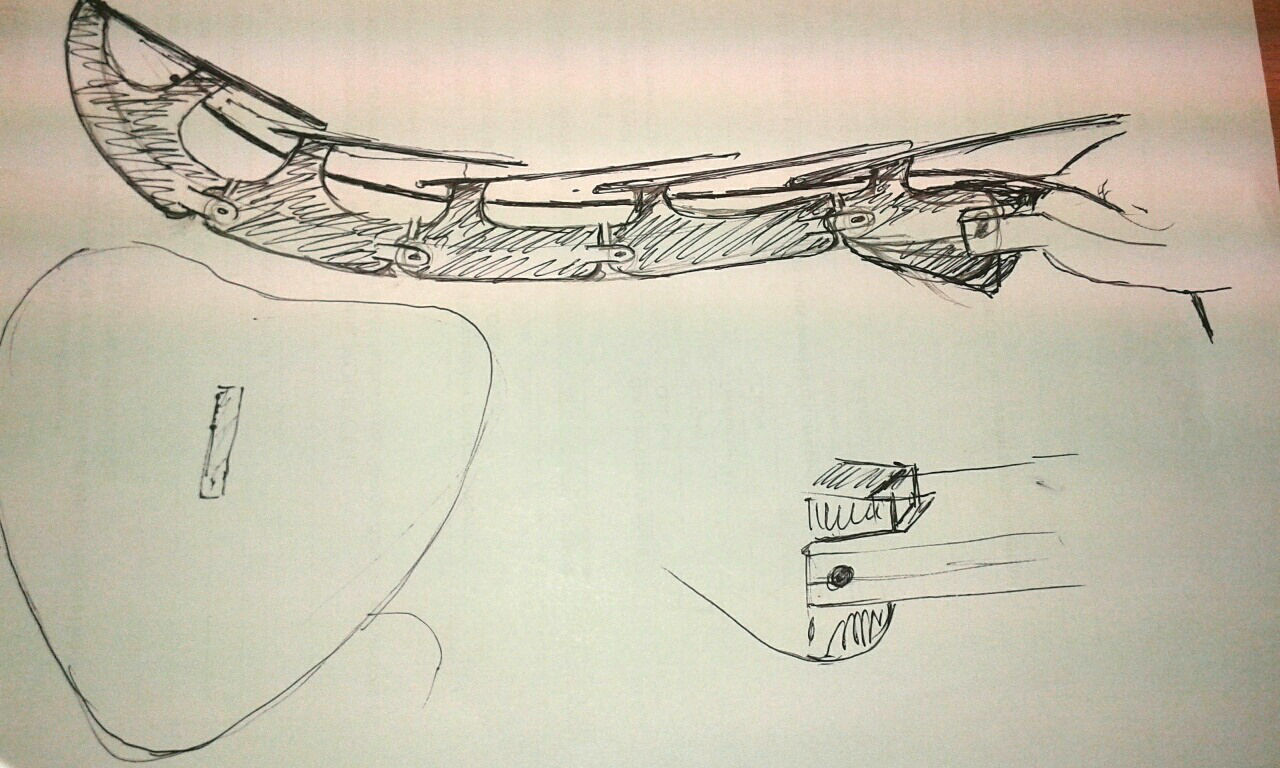
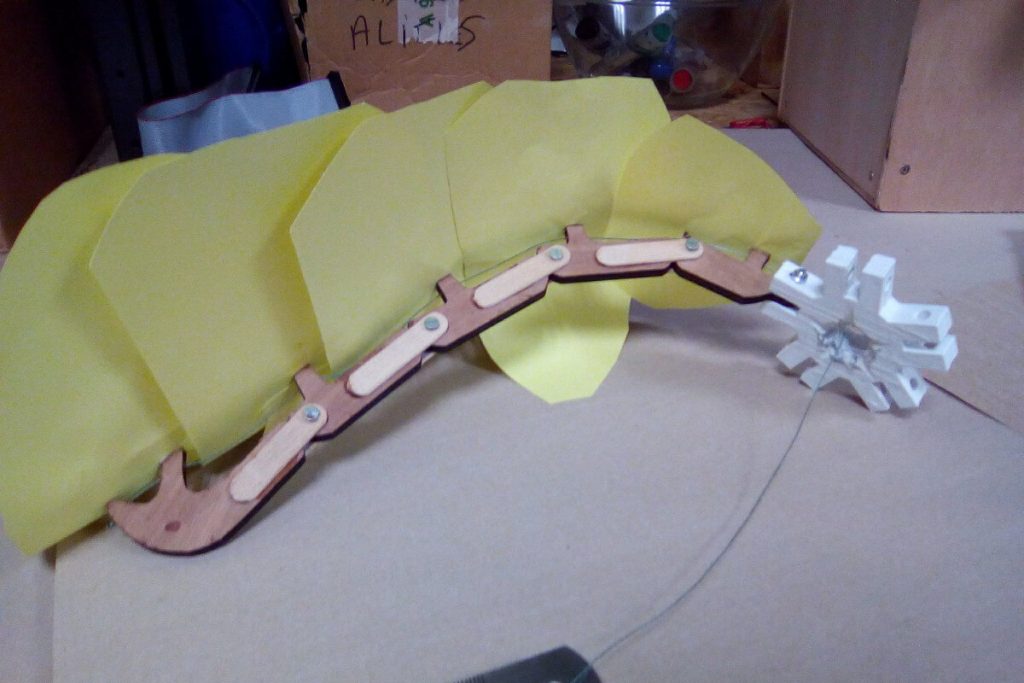
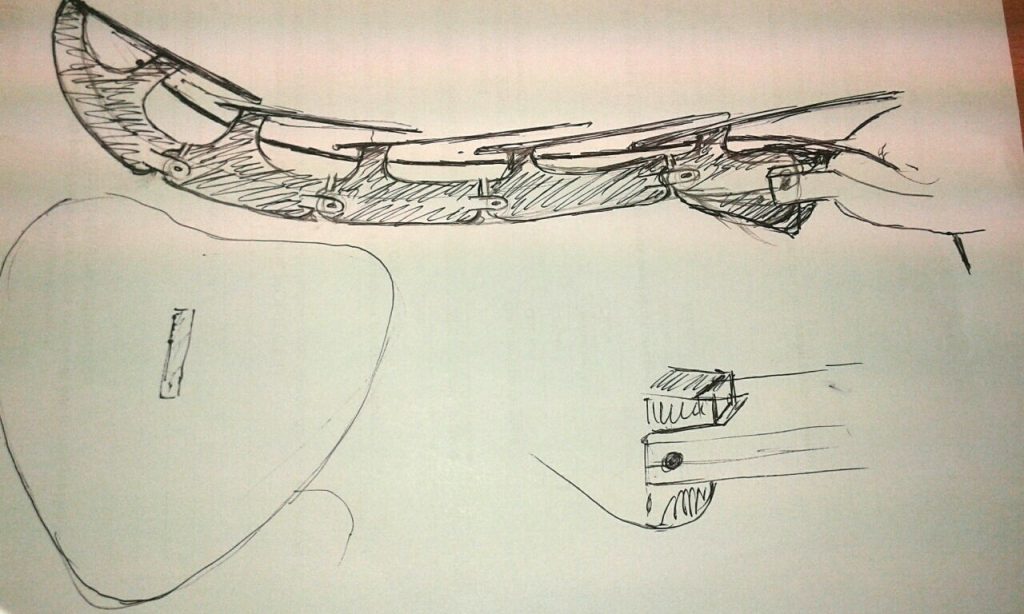
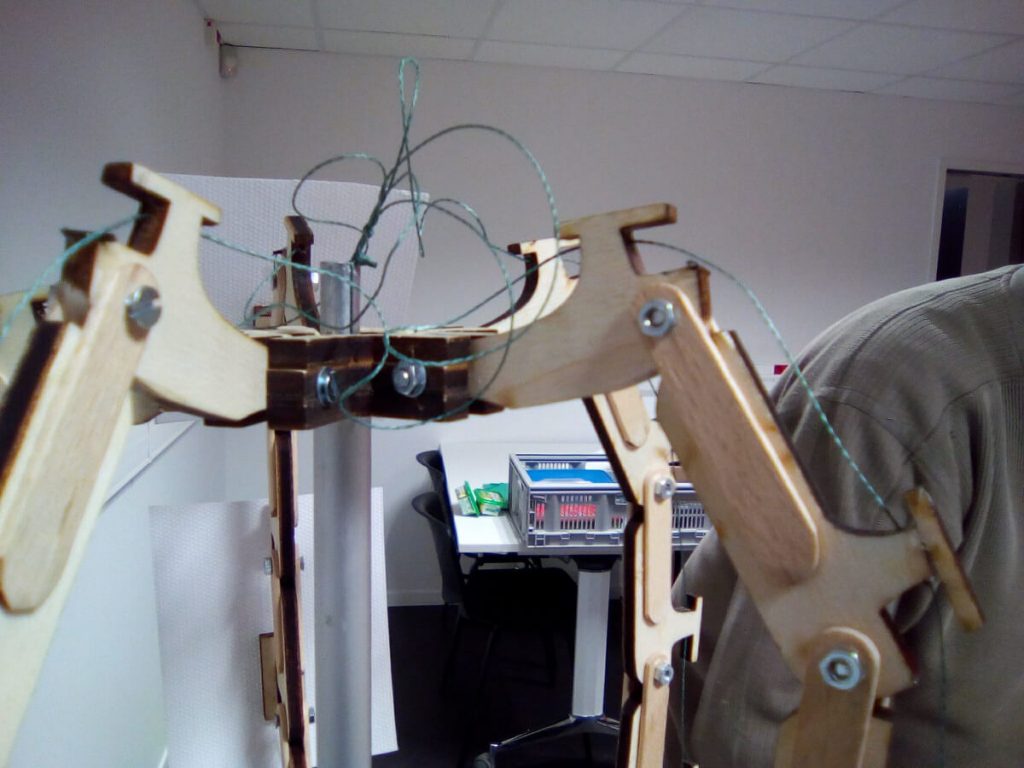
C’est la plus complexe à reproduire. Pour chaque pétale 5 articulations en bois, enfilées sur la tresse de pêche qui sert à sont connectées avec des vis et des bâtons de glaces!
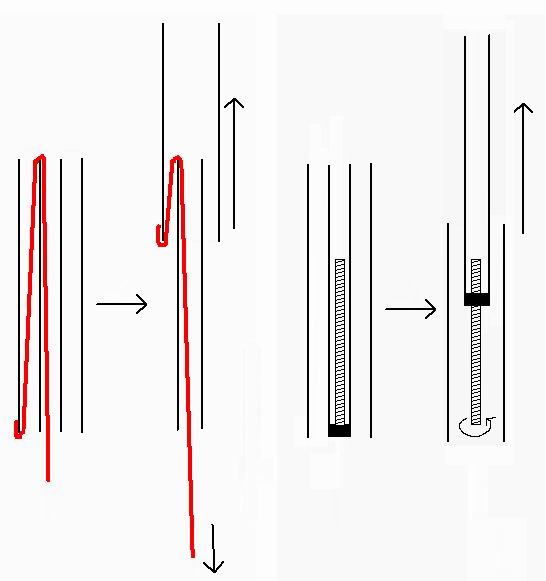
Le svg des pièces est là. La tige : 2 tubes sont emmanchés et un fil passe du plus étroit au plus large de façon à ce que, quand on tire sur le fil le plus large remonte et que la fleur « pousse ».
à améliorer : gare aux frottements qui usent la tresse! Peut-être passer sur un système de vérin?
 Design
Design

Pour habiller la structure bois les pétales viennent se coller sur de petites plate-formes à clipper. La difficulté est dans le chevauchement, qui doit avoir lieu mais ne doit pas gêner le mécanisme. Sophie a trouvé la solution : les morceaux d’un pétale doivent s’empiler de l’intérieur vers l’extérieur de la fleur. Le fichier svg est compressé ici.
à améliorer : Le mécanisme est complexe et la tresse centrale, qui sert à la fois à lever les pétales et à faire pousser la tige, risque de rompre ou de s’emmêler à force de mouvements.
Électronique
Comme pour les autres, le montage de cette fleur s’appuie sur le schéma type imaginé autour de l’Arduino Nano. Son seul moteur doit pouvoir tirer assez fort pour faire s’ouvrir cette belle plante, il est d’un gabarit plus important que ceux des autres fleurs.
Programmation
Son code est le plus simple de toutes puisqu’il ne contrôle qu’un moteur. Il évolue sur le github de l’asso par ici.
❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀
Prototype choisi : Mini

L’idée de départ : un robot simple et joli, un kit pour expliquer plusieurs outils, facile à reproduire en série pour un effet wouaou a) de surprise en déclenchant 1 fleur selon 1 capteur de mouvement OU b) de synchronisation de plusieurs fleurs regroupées.
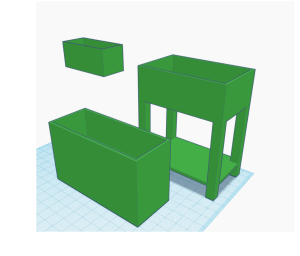
Mécanisme
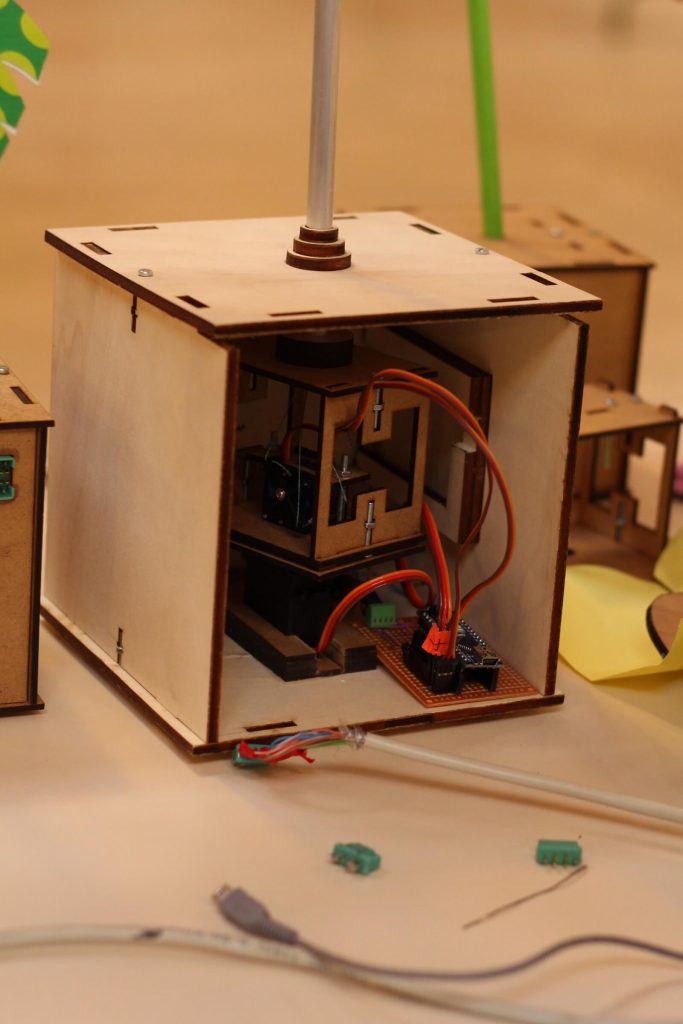
2 (ou 3) servomoteurs calés dans le socle sous la tige. Le premier pour incliner la fleur et le second pour ouvrir / fermer les pétales. Comme pour VIVA c’est une tresse de pêche qui sert à coudre les pétales pour les relier aux palonniers des servo. Les fichiers du socle à découper dans du 3 mm sont ici, ils comprennent : – la boîte cube de 15 cm de côté – la boîte interne qui sertit les petits servo 9g. – la partie haute qui permet à la fleur de basculer.
à améliorer : prévoir les prises d’alimentation et le tiroir support de carte électronique
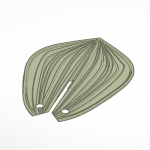
Design

Pour créer les pétales de notre fleur on part d’une disquette récupérée.
On découpe la partie souple en autant de parts qu’on veut de pétales, et on vient coller des disques de bois sur la partie métallique au centre, dessus pour éviter le frottement (à améliorer) et dessous pour s’insérer sur le support en haut de la tige.
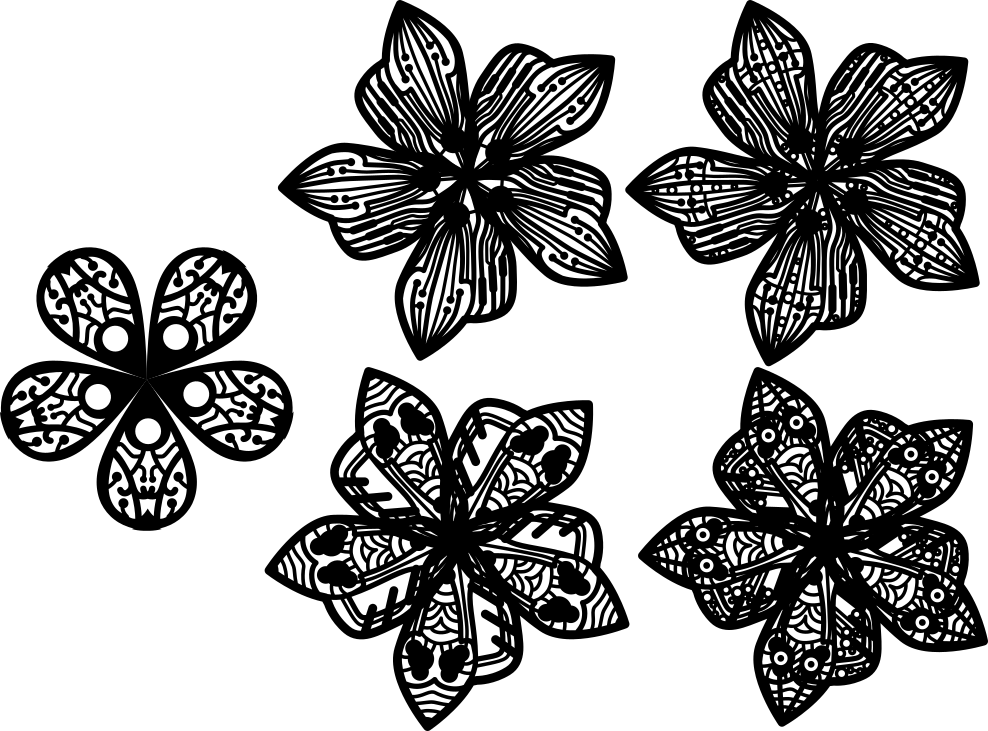
Pour donner du volume on peut faire un pétale qui se replie et prend la disquette en sandwich (comme sur la rouge ou la bleue). Que 2 motifs pour l’instant (en lien les svg des pétales ajourés) mais sur ce principe on imagine bien plein d’assemblages différents, des pétales pleins et plats pris dans ou posés sur les pétales pliés…
à améliorer : les découpes aux parties libres s’emmêlent quand la fleur se ferment et gênent le mouvement.
Électronique
Comme pour les autres, le montage de cette fleur s’appuie sur le schéma type imaginé autour de l’Arduino Nano.
Pour que les servos soient suffisamment alimentés et éviter de griller la carte Arduino on cherche encore la meilleure solution :
– plusieurs kits sur une seule alim de pc récupérée pour une scénographie groupée, – une alimentation type transfo à mini jack pour les kits indépendants – à ramener chez soi.
Programmation

Sur cette fleur kit en particulier les codeurs ont bien balisé le terrain : une série de variables pour calibrer les mouvements, et 2 fonctions bien faciles à prendre en main. L’intégralité du programme est dispo sur le github de l’asso par ici.
❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀❁❀
Le cœur des fleurs: électronique
Mais qu’est-ce qui fait bouger ces fleurs ?
- Le vent ?
- Le soleil (levant) ?
- Un (tout) petit ensemble d’électronique et de servomoteurs ?
Nous avons eu l’occasion d’expliquer ce mystère aux nouveaux venus du FabLab : une boite, une tige, des feuilles, des pétales… Et certains se sont pris au jeu du projet collaboratif, fer à souder en main.
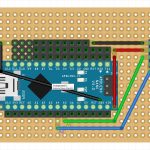
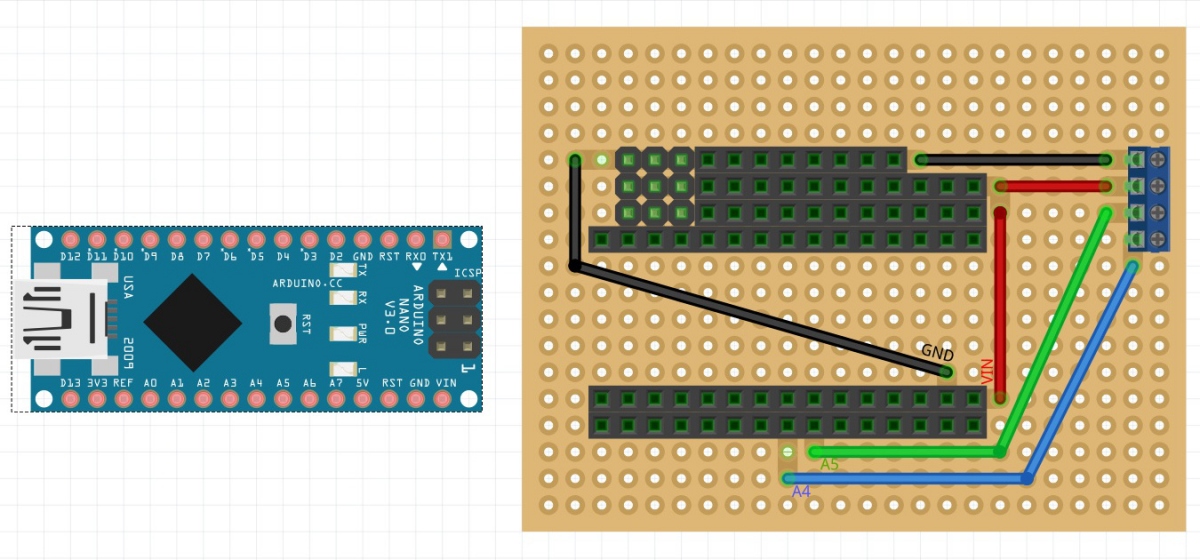
La carte-support de l’électronique embarquée
Pour accueillir le micro-contrôleur (Arduino Nano), il faut réaliser une carte-support. L’option choisie à ce stade de la conception repose sur un circuit pastillé de 5 cm x 7 cm sur lequel on implante des connecteurs, un bornier et quelques « straps ».
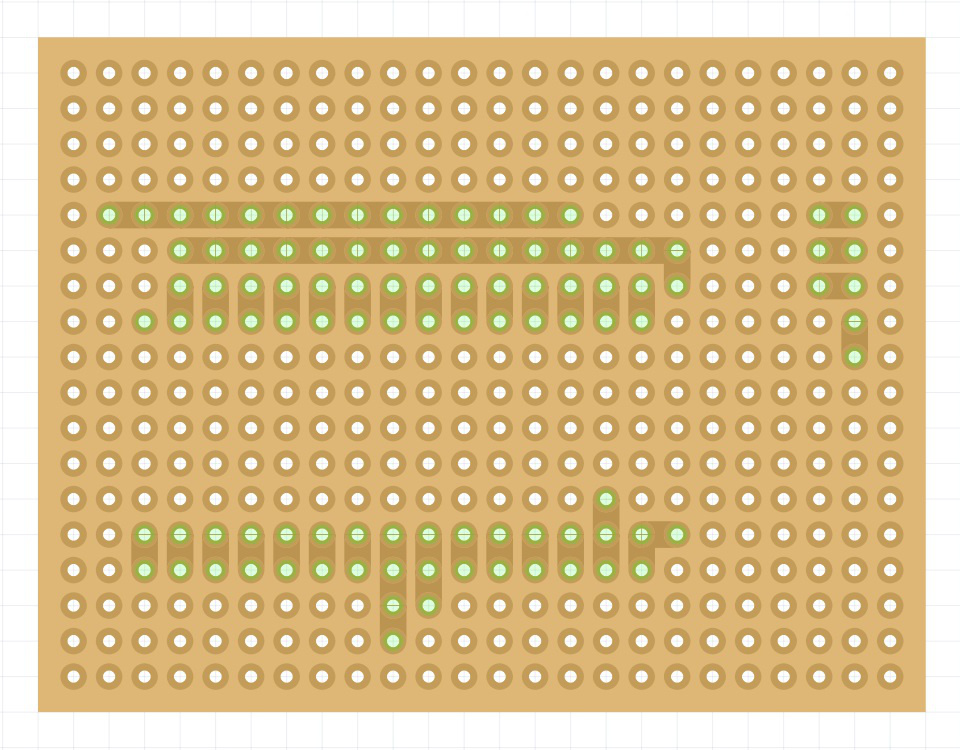

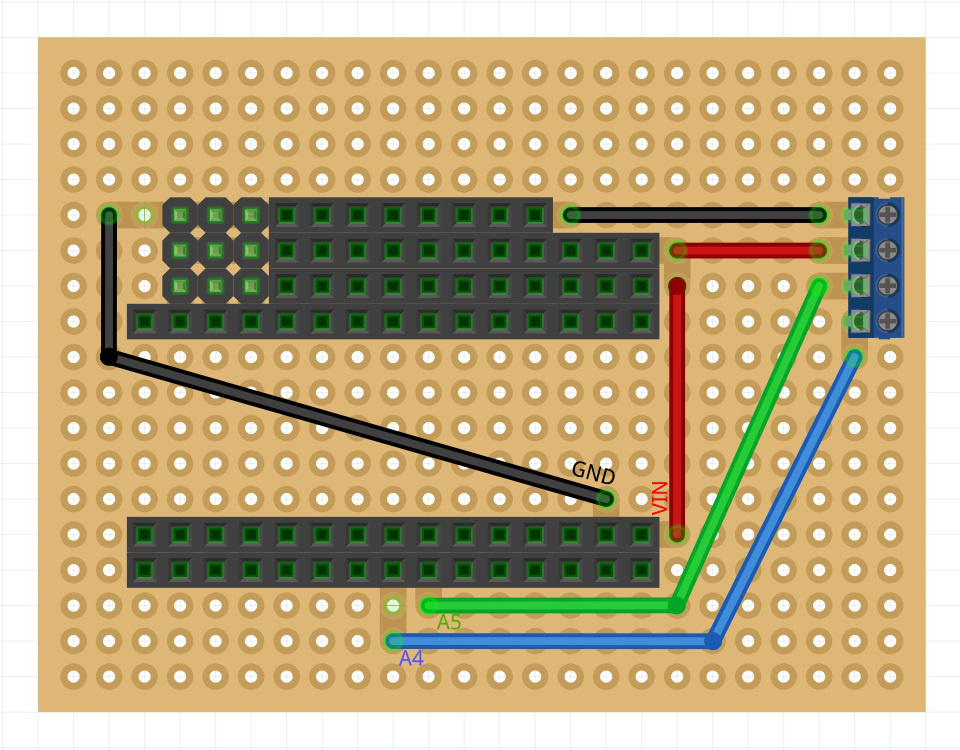

On distingue les lignes principales de ce montage sur le schéma Fritzing (*) :
- L’alimentation (VIn), en rouge
- La masse (Gnd), en noir
- Le signal d’asservissement, fils vert et bleu
De cette façon, la carte peut être utilisée indifféremment en tant que maître ou esclave, tout en conservant la possibilité d’évoluer en connectant les futures options sur les barrettes femelles.
Le câblage de l’alimentation (en haut de la carte) permet de brancher trois servomoteurs sur les sorties 9, 10 et 11 sans modification de leur prise d’origine…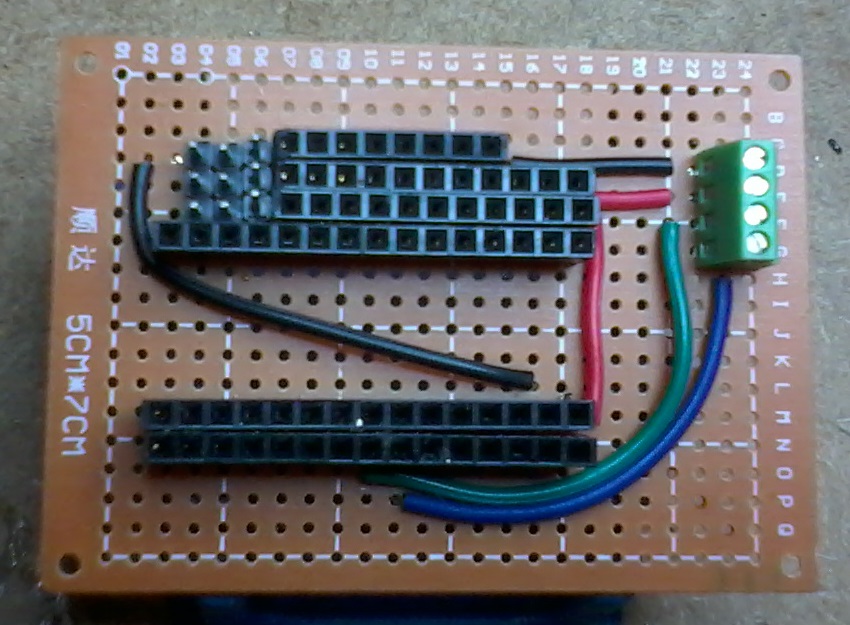
Fritzing est un logiciel libre de conception de circuit imprimé qui permet de concevoir de façon entièrement graphique le circuit et d’en imprimer le typon. (Source : Wikipédia)
Laisser un commentaire
Vous devez vous connecter pour publier un commentaire.