Wheely Bot

Retour sur un projet de Robot roulant évolutif pour une approche ludique et pédagogique de la robotique, librement inspiré du projet « Poppet » et mis au point par le groupe robots cette année. (octobre 2019 – février 2020)
Ci-après une copie de la note d’intention du groupe au début du projet :
Dans sa version V0, le mobile évoluera de façon autonome en évitant les obstacles et acceptera d’être télécommandé via Bluetooth depuis un téléphone.
Principales caractéristiques :
− Volume réduit
− Structure cubique
− Deux roues motrices
− Autonome
Fonctionnalités (programmation) :
− Marche avant
− Évitement d’obstacles
− Mode « Délire »,
− Mode « Commande » (prise de contrôle avec son tel via Bluetooth)
Le projet a été conçu pour servir de support d’initiation aux technologies découpe laser, Arduino & App Inventor. Une attention particulière sera portée à la programmation de « briques élémentaires » pouvant être facilement réutilisées selon l’évolution du prototype vers de nouvelles fonctionnalités.
Les fichiers sources et une documentation complète en .pdf sont disponibles à la fin de cet article, qui retrace les grandes étapes du projet.
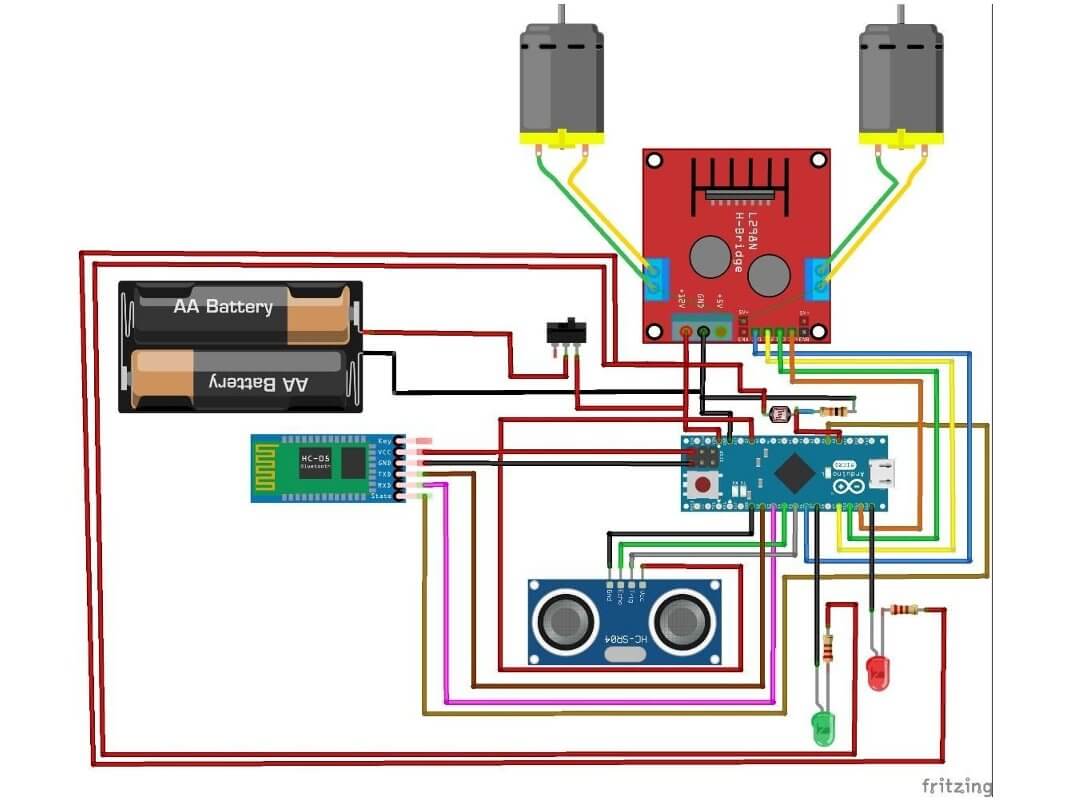
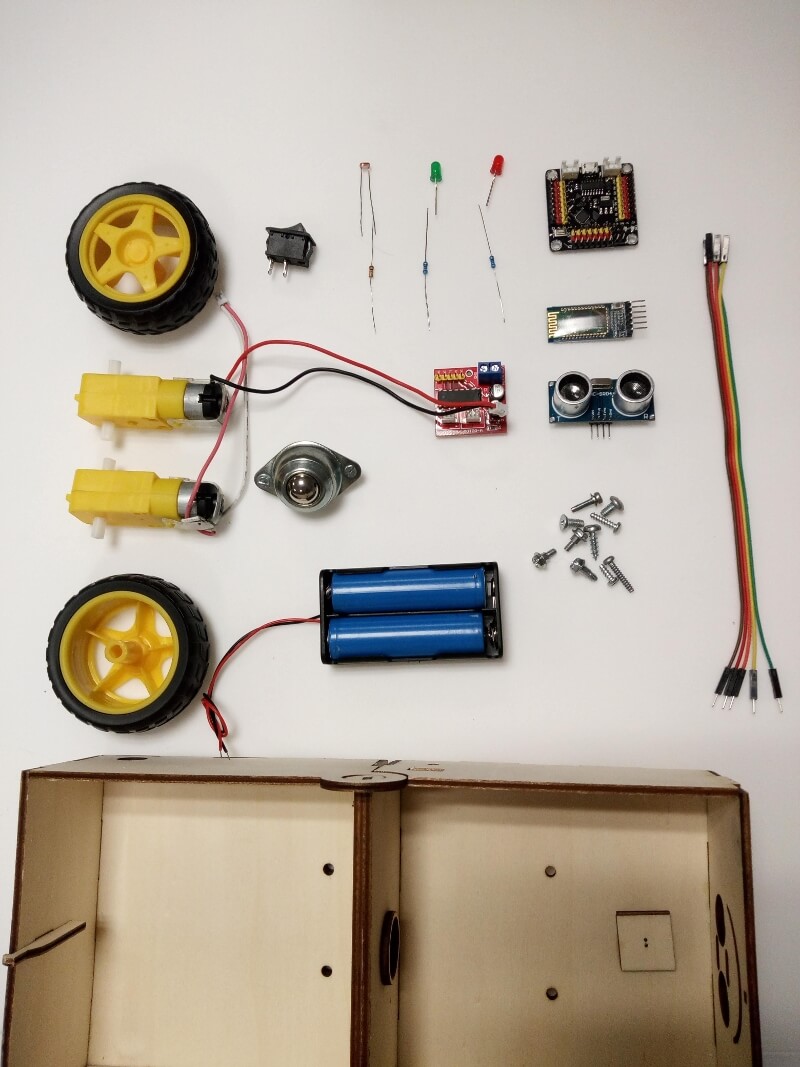
Équipement de base :
Après avoir testé plusieurs composants et versions de cartes Nano, nous avons opté pour
− Carte Arduino Nano Strong,
− 2 x Accus Li-On 3.7V (18650 & « Power Bank » de recharge)
− Deux moteurs réductés
− « Pont en H » type L298
− Capteur de distance à ultrasons
− Autre capteur pour déclenchement du mode « Délire »
(nous avons opté pour 1 photorésistance, mais cela aurait pu être… un bouton tactile, bouton poussoir, capteur infra-rouge…)
− Module Récepteur Bluetooth HC05
− Deux LED ou plus, haut-parleur (éléments n’ayant aucune incidence sur la programmation des comportements si absents)
à retrouver dans la doc pdf très complète de Carine & Erwann pour le projet
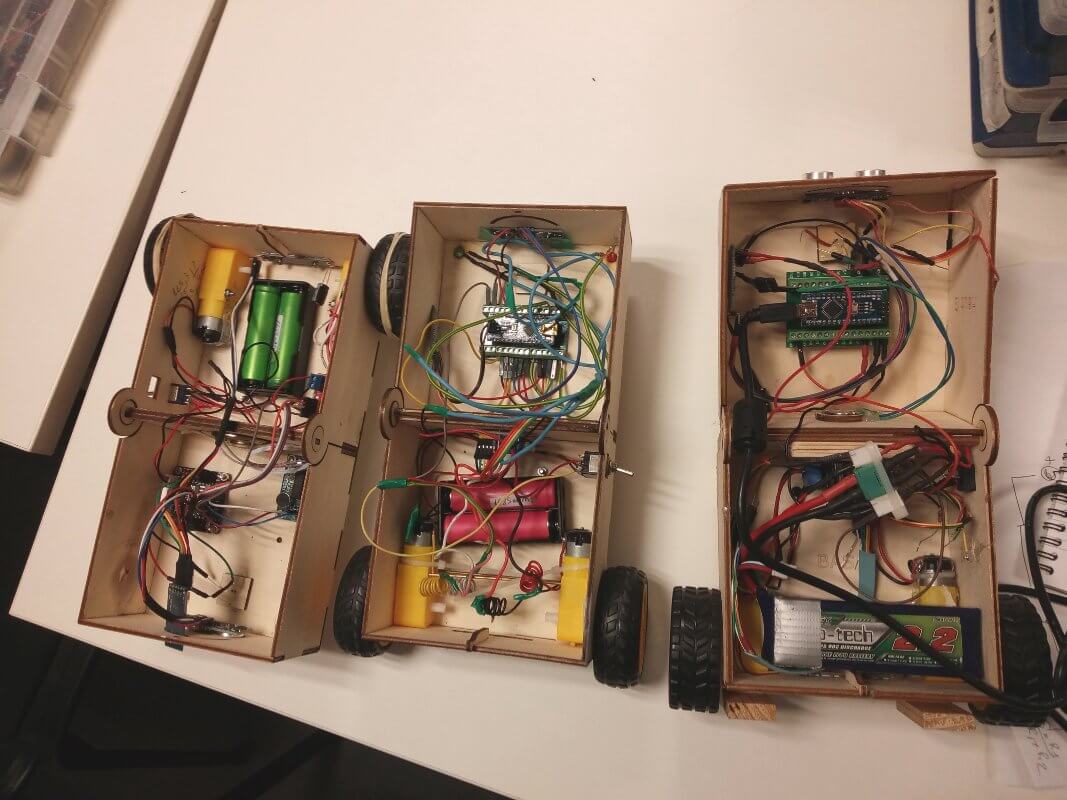
Boîtier Sympathique
Le format cubique de la boîte découpée au laser donne une stabilité et un visage au robot en accueillant tous les ingrédients choisis. Le fichier prévoit même l’ajout potentiel d’autres composants : un haut-parleur, une barrette de LED RGB… etc…
La charnière un peu délicate à monter, permet d’ouvrir complètement le robot et d’accéder au montage facilement, même avec de gros doigts.
Programme simple
Conformément à notre objectif, nous avons organisé le code Arduino en petites fonctions, faciles à comprendre et à modifier… Ainsi les déplacements avec Avance(); Recule(); Droite(); Gauche();
l’écoute des capteurs avec TestObstacle(); …
Jean-Marc, Laurent & François ont lissé les points difficiles (comme le test de la photorésistance) pour permettre aux débutants de s’approprier le code plus facilement.
De la même façon, nous avons décomposé la construction de l’application via App Inventor et pendant l’atelier les apprentis se concentraient sur le contrôle des LED.
Les blocs de contrôle moteurs étaient fournis en fin d’initiation, une fois le principe de communication maîtrisé.
Atelier réussi
Grâce à ce gros boulot (rigolo) en amont, l’animation d’une initiation et la construction de robots connectés par les apprentis s’est très bien passé.
Nous avons même pu organiser une course dans les couloirs à la fin de la journée, la plus grosse difficulté : reconnaître son robot parmi les clones et identifier le gagnant !


Un projet de groupe drôlement bien mené et la satisfaction d’avoir pu partager cette réalisation avec des jeunes en formation…
C’était une belle réalisation pour notre association, juste avant que ne commence la crise sanitaire et ses restrictions. Grand Bravo au club Robots!
Laisser un commentaire
Vous devez vous connecter pour publier un commentaire.